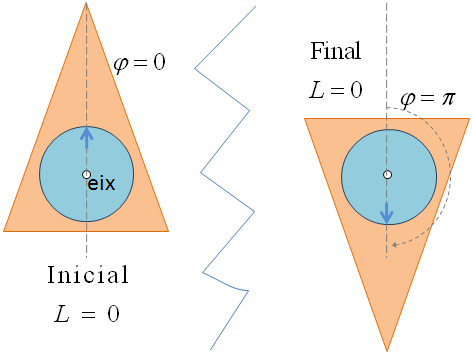
Fig. 1: Posicions en repòs, inicial i final, d'un cos compatibles amb la rigidesa.
|
| Fig. 1: Posicions en repòs, inicial i final, d'un cos compatibles amb la rigidesa. |
El moviment d'un "cos", conjunt de partícules més o menys interactuants, és en general molt complex. Pensem en com es mouen els núvols o una massa gelatinosa. Es fa difícil descriure "com es mou" el cos.
Sempre podrem distingir un moviment de translació, que associem al moviment del centre de masses. Quan el centre de masses es mou, diem que el cos fa un moviment de translació. Si el centre de masses roman en repòs, diem que el cos "no es mou del lloc on és". Volem dir que, encara que canviï de forma i alguna part pugui allunyar-se ostensiblement, en conjunt, s'està al mateix lloc: el centre de masses no es belluga. Una translació és un moviment que es caracteritza per tenir diferent de zero, en tot moment, la quantitat de moviment total.
Si en un moment donat veiem que el centre de masses d'un cos és en repòs en un lloc i, més tard, és en repòs en un altre lloc, segur que el cos ha hagut de realitzar un moviment de translació. Ara bé, segons la llei de conservació de la quantitat de moviment un cos aïllat no pot adquirir quantitat de moviment, per tant de cap manera pot fer un moviment de translació. Si en un moment donat veiem que el centre de masses d'un cos és en repòs en un lloc i, més tard, és en repòs en un altre lloc, segur que ha estat per intervenció exterior al cos, el cos no ha estat, durant el procés aïllat. No es tracta d'un cos aïllat.
 |
| Fig. 2: La nostra interpretació del moviment necessari per anar d'una a l'altra posició comporta considerar el cos rígid. Aquest procés requereix una no conservació del moment angular. |
Descartarem, doncs, les translacions. Si un cos no es trasllada encara podrà canviar la posició de les seves partícules sense canviar la posició del centre de masses. Si ho fa de manera que, en tot moment , no canvia la forma, diem que gira o que fa una rotació. Una rotació pura ( sense canvi de forma) es caracteritza per tenir, en tot moment, el moment angular diferent de zero.
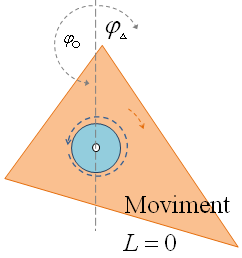
Considerem un cos aïllat (sense cap mena de fricció amb l'exterior), com el de la figura 1, en la seva posició inicial. Aquest cos està format per un triangle rígid i un disc circular que pot girar respecte de l'eix (que coincideix amb el centre de masses). Que el cos estigui aïllat no vol dir que no pugui disposar d'energia per fer moure les seves parts, com nosaltres quan fem contraccions d'alguns músculs que provoquen moviments dels braços respecte de la resta de cos.
Si en un moment donat veiem que el cos està en repòs, és a dir, aturat amb acceleració angular nul·la, en la posició inicial i, més tard, el veiem en repòs en la posició final, molt probablement pensem que el cos ha realitzat un moviment de rotació com el de la figura 2. I si en sabem prou, conclourem que la llei de conservació del moment angular no permet que un cos aïllat a partir del repòs faci una rotació, ja que mentre rota el seu moment angular és diferent de zero i, per tant, el moment angular no es conserva durant el procés.
Si hi pensem una mica més, ens adonarem que el nostre
raonament no aprofita el fet que el cos no és rígid,
que pot moure les seves parts. Així és com concebem un
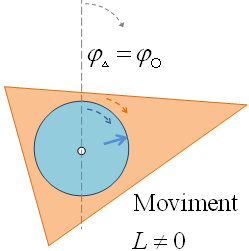
moviment relatiu de les seves parts il·lustrat a la figura 3. Per simplificar,
podem pensar que les dues parts del cos, triangle i disc, estan fetes de manera
que tinguin igual moment d'inèrcia respecte de l'eix ![]() .
Degut a la conservació del moment angular,
.
Degut a la conservació del moment angular,
| |
(1) |
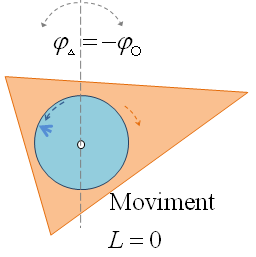 |
| Fig. 3: Un possible moviment compatible amb la conservació del moment angular però que requereix la no rigidesa del cos. |
on![]() són
les velocitats i els desplaçaments angulars de cada part respecte d'una
referència fixa a l'espai.
són
les velocitats i els desplaçaments angulars de cada part respecte d'una
referència fixa a l'espai.
És a dir que disc i triangle giren en sentits contraris respecte d'una mateixa referència fixa. El cos pot arribar a la posició final i romandre-hi en repòs sense haver violat la conservació del moment angular. En tot moment, el moment angular és zero. Podem dir que el cos ha girat en anar de l'orientació inicial a la final? Si acordem que girar és el que es fa en el procés de la figura 2, és clar que no ha girat. En general, el que sí podem dir és que el cos s'ha reorientat.
Amb aquest exemple, el que hem vist és que una reorientació no implica, en general, que hi hagi d'haver obligatoriament una rotació pura. Només en el cas que el cos sigui rígid és obligatori que hi hagi una rotació.
La reorientació del cos que hem fet és estricta
en el sentit que les posicions inicials i finals es podien atènyer mitjançant
una rotació pura, actuant sobre el cos com a rígid: ens ha interessat
el que li passa al triangle i també al disc. Si no som tan estrictes,
podem imaginar un cos com el de la figura 4, en el qual ara el disc pot tenir
un moment d'inèrcia diferent i més petit que el del triangle per
enfasitzar que la nostra atenció ara es fixarà en el que li passa
al triangle.És senzill veure que si volem reorientar el triangle en un
angle ![]() haurem de fer
girar en sentit contrari el disc un angle
haurem de fer
girar en sentit contrari el disc un angle ![]()
 |
(2) |
 |
| Fig. 4: L'objecte que volem reorientar és el triangle. Per això incorporem un disc que gira a voluntat. |
Els satèl·lits artificials, com el triangle, fan servir mecanismes semblants per reorientar la posició sense necessitat de malgastar combustible (no només energia, en especial sense perdre massa).
En termes generals els cossos aïllats, malgrat que no es poden traslladar, si que es poden reorientar. Per això, sense entrar en detalls, cal que tinguin suficients graus de llibertat, disponibilitat energètica i manera de fer moviments interns.
 |
| Fig. 5: Descomposició del moviment que fa un gat mentre és en caiguda lliure. |
Un molt bon representant de cos amb suficients graus de llibertat,
disponibilitat energètica i manera de realitzar moviments interns és
un gat. És molt conegut ( vegeu ![]() http://en.wikipedia.org/wiki/Falling_cat_problem)
el fet que els gats cauen sempre amb les potes encarades al terra malgrat que
a l'inici de la caiguda les potes miressin cap al cel. Volem distingir aquí
el que fa un gat del que fa, per exemple, un saltador de trampolí o palanca.
El moviment del saltador, en què adquireix una rotació ràpida
fent un o dos mortals abans de caure a l'aigua, és possible perquè,
quant surt de la palanca o trampolí, mira d'adquirir una certa quantitat
de moment angular i, per tant, de rotació, que després gestionarà
disminuint o augmentant el moment d'inèrcia del seu cos respecte de l'eix
de rotació que passa pel seu centre de masses, augmentant o disminuint,
així, la velocitat de rotació.
http://en.wikipedia.org/wiki/Falling_cat_problem)
el fet que els gats cauen sempre amb les potes encarades al terra malgrat que
a l'inici de la caiguda les potes miressin cap al cel. Volem distingir aquí
el que fa un gat del que fa, per exemple, un saltador de trampolí o palanca.
El moviment del saltador, en què adquireix una rotació ràpida
fent un o dos mortals abans de caure a l'aigua, és possible perquè,
quant surt de la palanca o trampolí, mira d'adquirir una certa quantitat
de moment angular i, per tant, de rotació, que després gestionarà
disminuint o augmentant el moment d'inèrcia del seu cos respecte de l'eix
de rotació que passa pel seu centre de masses, augmentant o disminuint,
així, la velocitat de rotació.
No és el cas dels moviments de caiguda dels gats. Aquests parteixen amb un moment angular zero, amb les potes cap amunt, i acaben amb un moment angular zero, amb les potes cap avall. Per poder entendre millor el que passa, podem prescindir de la gravetat i de tota mena de friccions amb l'aire. Pensem en el gat com un cos aïllat en l'espai, sense cap mena de força externa. A la figura 5 podem veure una animació en què es descompon el moviment complex del gat en un moviment de deformació muscular -que només de veure'l ja et fan mal els ronyons- i un moviment rígid. Observant amb calma la figura podem veure com en tot moment el gat té un moment angular zero. El gat aconsegueix passar d'una posició a l'altra, no per una rotació directa, sinó per un moviment que no contradiu la conservació del moment angular. Tampoc hi intervenen les friccions ni altres efectes.
Això ho poden fer els gats no pel fet de ser gats, és clar. En principi nosaltres, depenent de l'edat i altres aptituds, estem capacitats per fer contorsions complexes que ens permetin reorientar el nostre cos a voluntat. Passa que, en la vida quotidiana, no ens trobem en situació de poder practicar aquestes capacitats i trobem molt més efectiu interactuar amb el nostre entorn, terra, parets, etc, per fer el mateix. Algú ha vist una contorsionista/acròbata fer el moviment del gat? Que quedi com a repte per al món del circ.
Autor d'aquesta pàgina: Xavier Jaén, professor de física de l'ETSEIB de la UPC.
Aquesta
obra està subjecta a una
Llicència
de Creative Commons
![]()